製品情報
| 原産地: 中国(本土) | 銘柄: UIのロボット | モデル番号: UIM24104-M-S |
| モータータイプ: ステッパモーター | 両極: RS232インターフェイス | PMWのチョッパー: 一定した流れ |
包装
| 包装: 輸出カートン |
仕様
段階モーターコントローラーのサイズ: 42.3mm*42.3mm*14.5mmの1.5-4A調節可能な流れ12-40Vの入力電圧はモーターによって統合できる
段階モーターコントローラー
モータードライブ特徴
−の広い供給電圧の範囲12の~ 40VDC
−の出力電流4/8Aの調節可能な指示
第16マイクロステップ決断への十分の−
PWMの一定した現在の制御を用いる−の二重完全なH橋
NEMA 17モーター(半分ステップ)のための−の正確なマイクロステップおよび現在の制御、6600のRPMの最高速度およびNEMA 17/23モーター(クォードステップ)のための4000のRPM。
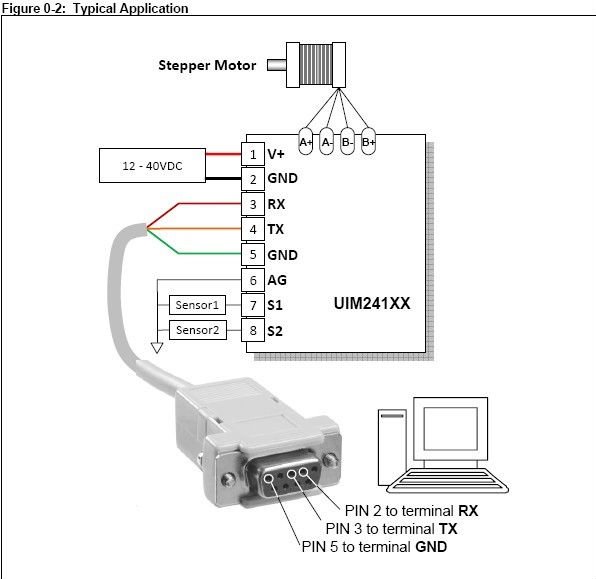
RS232インターフェイス
− RS232のthree-wireシリアル通信
−の最高のボード・レート57600ビット/秒
埋め込まれたDSPマイクロプロセッサ
−は64ビットの計算の精密高性能デジタル信号処理のマイクロコントローラーを埋め込んだ
−の指示による絶対位置のカウンター、調整またはセンサーの入力
−によって進められる動作制御モジュール、0.25sの0から4000のRPMからそして0.5sの0から6600のRPMから(NEMA17/23のために)
− 2センサーの投入口は、デジタル2つまたは1digital 1アナログ入力が左舷に取ると同時に形成することができる(12bit)
− 8のプログラム可能な実時間でき事基づかせていた変更の通告(断続器と同じような)
6つのセンサーのでき事によって誘発される− 5のプログラム可能な行為
、直観的で簡単な、−豊富な指示
−のユーザーフレンドリーインターフェイス
記述
UIM24104およびUIM24108はRS232インターフェイスが付いているミニチュア段階モーターコントローラーである。 ユーザー装置はASCIIによってコードされる指示を使用してRS232によってこれらのコントローラーに命じることができる。 指示はであり簡単、直観的欠陥容認する。 ユーザーに段階モーター運転の先発の知識があるように要求されない
UIM241コントローラーの建築は通信システム、基本的な動作制御システム、絶対位置のカウンターおよび実時間でき事基づかせていた変更の通告システムから成り立つ。 埋め込まれた64-
ビット計算の精密DSPコントローラーは動作制御のリアルタイム処理を保証する
そして変更の通告。 選択のための2つの任意高度モジュールがある: 高度の動作制御モジュールおよび入れられた制御モジュール。 UIM241を使うと進められた動作制御は、指定NEMA 17/23モーター0.5秒の6600までのRPMおよび0.25秒(オンラインビデオの4000のRPMをrampできる
ダウンロードのために利用できる)。
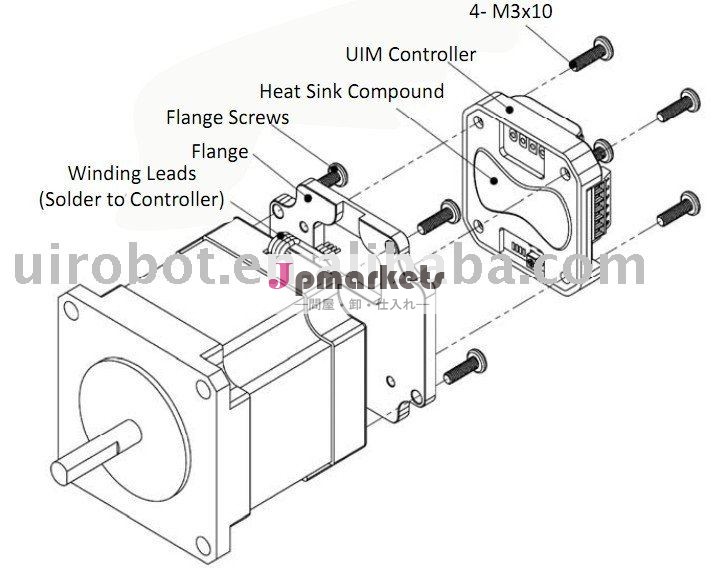
UIM241コントローラーはフランジの適応によるNEMA17/23/34/42シリーズ段階モーターに取付けることができる。 コントローラーの厚さは14のmmよりより少しである。 エンクロージャはダイカストで形造られたアルミニウムから険しい耐久の保護を提供するために成り、熱放散を改善する
基本的な動作制御
ユーザー装置はリアルタイムの指示によって続く基本的な動きか変数を制御できる:
方向、速度、角変位は、流れを有効または無効になるマイクロ歩む、段階的に行ない、
H橋、等の速度の入力範囲は0の~ 65,000の脈拍または秒および角変位である
入力範囲は0の~ 2,000,000,000の脈拍である
高度の動作制御モジュール
高度の動作制御モジュールは可能ユーザー装置の助けなしで続く機能を行うためにである: 均一加速/減速、非線形加速/減速、S字型カーブの変位制御および自動方向制御。 UIM241XXは加速または減速率を定義するために2つの方法を提供する:
1.絶対値。 入力範囲: 1つの~ 65,000,000 PPS/Sec (脈拍かsec2)。
2.期間は、すなわち、終わると加速または減速のための期間が期待する。 入力範囲: 1つの~ 60,000ミリ秒
変位制御の入力範囲は0の~ユーザー定義の方向を用いる2,000,000,000の脈拍(ステップ)、である。 先回り制御の下で、実際の方向はモジュール自体によって制御される。 変位制御が行われたら、ユーザー構成によってRTCNが、あってもよい。 それからの時間は送られるRTCNにである1ミリ秒以内した
高度の動作制御モジュールはユーザーの指示によって不具または可能にされて
センサーは制御モジュールを入れた
UIM241XXセンサーの入力制御モジュールはTTLの入力または1つのチャネルのデジタルおよびチャネルのアナログ入力1つの2つのチャネルを支える。 ユーザーの指示はタイプを入れるために形成できる。 アナログ-デジタル(ADC)コンバーターの上で12bits正確さ、50K Hzのサンプリングレートである。 アナログ入力は出力上のユーザーの前の16のサンプルに更に平均される。 更新率は1K Hzである。 デジタル入力のために、ユーザーは各センサーの状態(センサーのでき事)が変わるとき望ましい行為およびREMFを形成できる。 6つのセンサーのでき事に区切ることができる5つの行為がある:
1.動く開始はユーザーを一致して速度および加速または減速率を前もって調整した。 方向はセンサーの電圧レベルによって定められる。
2.突然停止
3.停止するために減速しなさい
4.絶対位置のカウンターを再調節しなさい
5.変位制御をユーザーが前もって調整する動き変数を使用して処理する(例えば、SPD、STP、加速または減速の最高の開始の速度、最高は速度、等を減少する)。