製品情報
| 原産地: 中国(本土) | 銘柄: UIのロボット | モデル番号: UIM24204-M |
| モータータイプ: ステッパモーター | プログラム可能: ネットワーキングをバスで運ぶことができる | PMWのチョッパー: 一定した流れ |
| 両極: 高度の動作制御 |
包装
| 包装: 輸出カートン |
仕様
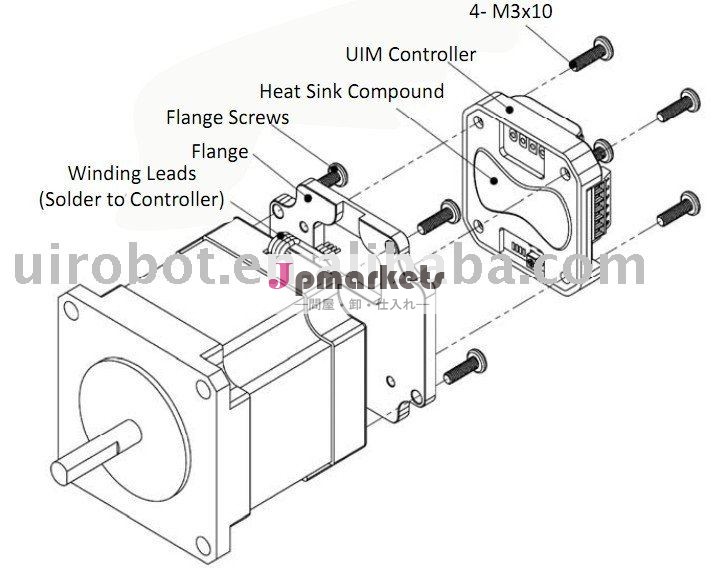
段階モーターコントローラーのサイズ: 42.3mm*42.3mm*14.5mmの1.5-4A調節可能な流れ12-40Vの入力電圧はモーターによって統合できる
段階モーターコントローラー
モータードライブ特徴
−の広い供給電圧の範囲12の~ 40VDC
−の出力電流4/8Aの調節可能な指示
第16マイクロステップ決断への十分の−
PWMの一定した現在の制御を用いる−の二重完全なH橋
NEMA 17モーター(半分ステップ)のための−の正確なマイクロステップおよび現在の制御、6600のRPMの最高速度およびNEMA 17/23モーター(クォードステップ)のための4000のRPM。
CAN2.0Bの能動態コミュニケーション
−の2ワイヤーインターフェイス
−長距離操作最高の1Mビット/秒の
−の差動バス、高いノイズ耐性
−の最高の100つのノードは
DSPマイクロプロセッサを埋め込んだ
−は64ビットの計算の精密高性能デジタル信号処理のマイクロコントローラーを埋め込んだ
−の指示による絶対位置のカウンター、調整またはセンサーの入力
−によって進められる動作制御モジュール、0.25sの0から4000のRPMからそして0.5sの0から6600のRPMから(NEMA17/23のために)
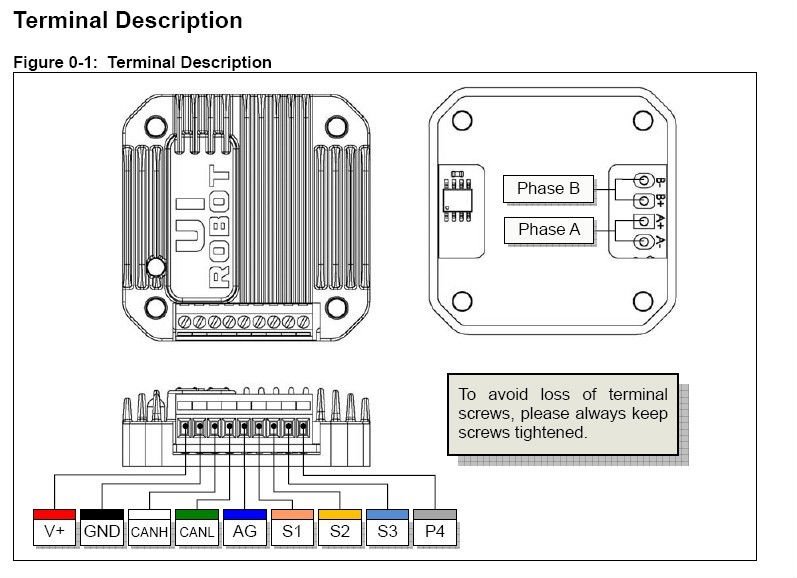
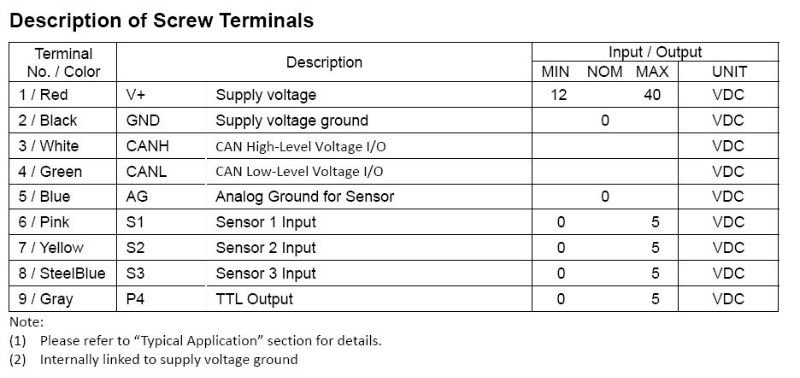
− 3のデジタル入力、1はアナログ入力(12bit)に形成することができる
3つのでき事か指示によって制御される− 1 TTLの出力
− 12の実時間事象は変更の通告を基づかせていた(断続器と同じような)
8つのセンサーのでき事によって誘発される− 5のプログラム可能な行為
、直観的で簡単な、−豊富な指示
−ユーザーフレンドリーインターフェイス
1.1.1コミュニケーション
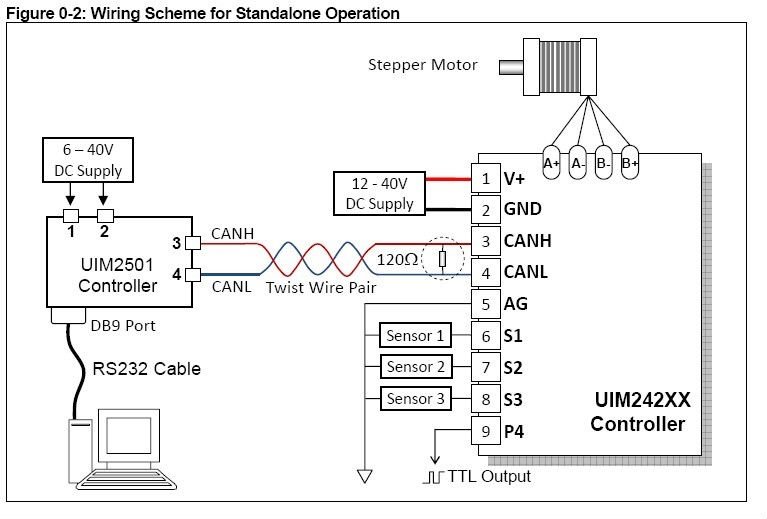
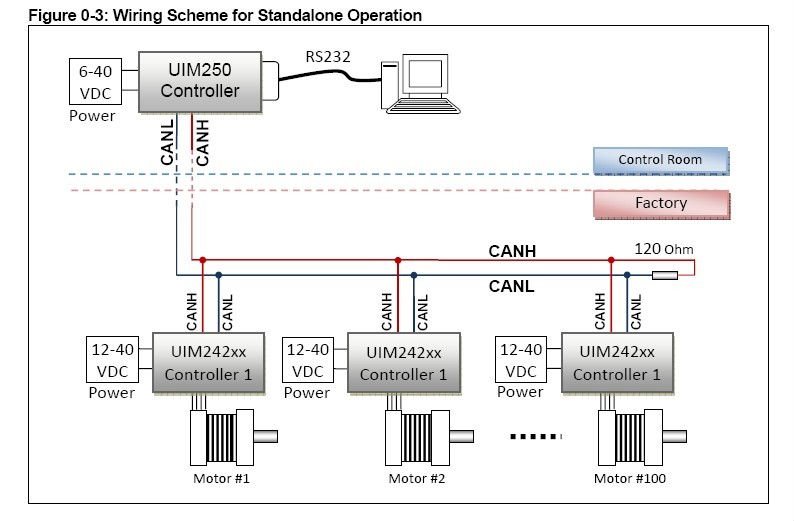
CAN-RS232コンバーターを通して(すなわちUIM2501)、ユーザー装置はASCIIによってコードされる指示を使用してRS232によって多数UIM242コントローラーに命じることができる。 UIM2501はRS232からのCAN2.0Bに指示を翻訳し、ターゲットコントローラーにユーザー装置によって指定したコントローラーIDに従って指示を送る
1.1.2基本的な動作制御
ユーザー装置はリアルタイムの指示によって続く基本的な動きか変数を制御できる:
方向、速度、角変位は、流れを有効または無効になるマイクロ歩む、段階的に行ない、
H橋、等の速度の入力範囲は0の~ 65,000の脈拍または秒および角変位である
入力範囲は0の~ 2,000,000,000の脈拍である。
1.1.3絶対位置のカウンター
1.1.4の実時間変更の通告(RTCN)
CPUの断続器、UIM242XXに類似した自動的にあらかじめ定義されたでき事の後である特定のメッセージを発生できユーザー装置にそれらを送る。 時間はでき事の起こることからの送られるメッセージへ1ミリ秒以内である。 メッセージの転送時間はUIM2501のRS232組み立てのボード・レートによって決まる。 転送時間はボード・レートが115200.に置かれれば0.5ミリ秒以内である
UIM242XX RTCNのシステム支援12のでき事: できている変位制御免除ゼロ
位置、センサー1/2/3の上昇端、落ちる端、上部の境界、アナログ入力の低くよりより低く境界およびTTLの状態等を越えるアナログ入力。 すべてのRTCNsは指示によって可能になるか、または不具にすることができる。
高度の動作制御モジュール
高度の動作制御モジュールは可能ユーザー装置の助けなしで続く機能を行うためにである: 均一加速/減速、非線形加速/減速、S字型カーブの変位制御および自動方向制御。 UIM242XXは加速または減速率を定義するために2つの方法を提供する:
1.絶対値。 入力範囲: 1つの~ 65,000,000 PPS/Sec (脈拍かsec2)。
2.期間は、すなわち、終わると加速または減速のための期間が期待する。 入力範囲: 1つの~ 60,000ミリ秒
変位制御の入力範囲は0の~ユーザー定義の方向を用いる2,000,000,000の脈拍(ステップ)、である。 先回り制御の下で、実際の方向はモジュール自体によって制御される。 変位制御が行われたら、ユーザー構成によってRTCNが、あってもよい。 それからの時間は送られるRTCNに1つの氏によって進められる動作制御モジュールがユーザーの指示によって不具または可能にされてよりより少しであるした