
製品情報
| 原産地: 中国(本土) | 銘柄: UIのロボット | モデル番号: UIM24208-S |
| モータータイプ: ステッパモーター | プログラム可能: ネットワーキングをバスで運ぶことができる | PMWのチョッパー: 一定した流れ |
| 2台のセンサーの入力: 両極 |
包装
| 包装: 輸出カートン |
仕様
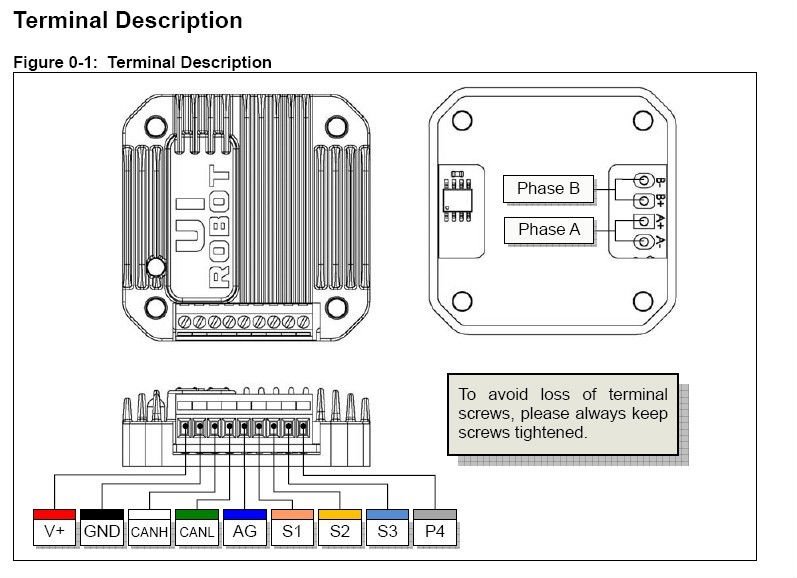
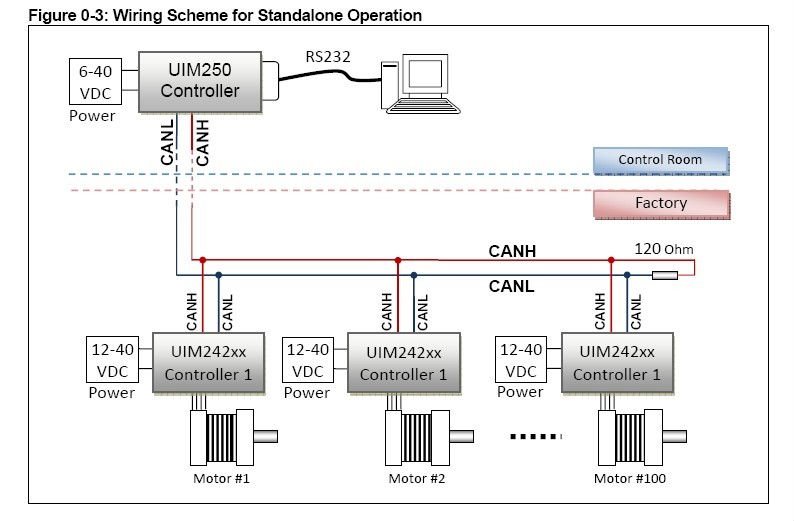
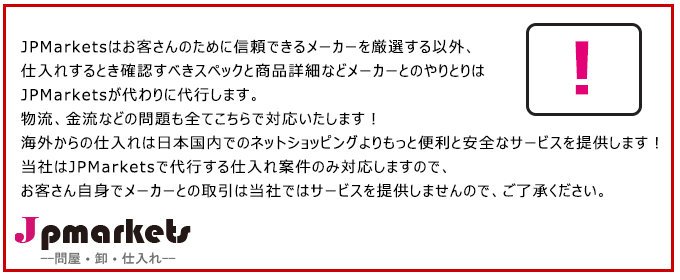
プログラム可能な段階的なコントローラー42.3mm*42.3mm*14.5mmの3-8A調節可能な流れ12-40Vの入力電圧; モーターによって統合できる
ステッパモータコントローラプログラマブル
モーター駆動特性
・マイナス; 広い電源電圧範囲12〜40vdc
・マイナス; 出力電流4/8a、 調節可能な命令
・マイナス; 〜フル16日マイクロ- ステップ解像度
・マイナス; デュアルフルh- ブリッジのpwm定電流制御
・マイナス; 正確なマイクロ- ステッピングと電流制御、 6600rpm最大のために速度モーターnema17( ハーフ- ステップ) と4000rpmのためのモーターnema17/23( クワッド- ステップ)。
Can2.0b積極的なコミュニケーション
・マイナス; 2- 線式インタフェース
・マイナス; 最大1mbps操作、 長距離
・マイナス; 差動バスト、 高いノイズ耐性
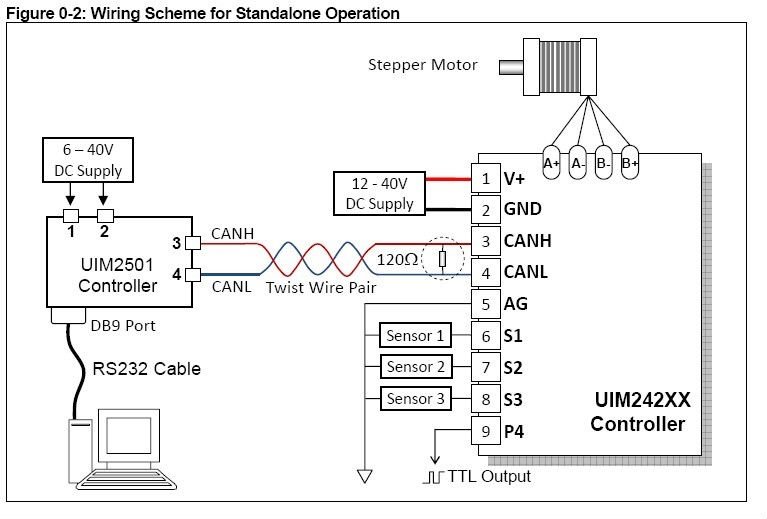
・マイナス; 最大100ノード
組み込みdspマイクロプロセッサ
・マイナス; 埋め込まれた64ビットの演算精度高- パフォーマンスデジタル信号処理マイクロコントローラ
・マイナス; 絶対位置カウンタ、 センサ入力によってリセット命令または
・マイナス; 高度なモーション制御モジュール、 から0〜4000rpmで0.25sからと0〜6600rpmで0.5秒( 用nema17/23)
・マイナス; 3デジタル入力、 するように設定でき1アナログ入力( 12bit)
・マイナス; 1ttl出力、 イベントや命令によって制御され3
・マイナス; 12リアル- 時間イベントに基づいて変更通知( 似たようなインタラプタに)
・マイナス; プログラマブル5アクションによってトリガイベント8センサー
・マイナス; シンプルな、 直感的な、 豊富な指示
・マイナス; ユーザ- フレンドリーなインターフェイス
1.1. 1通信
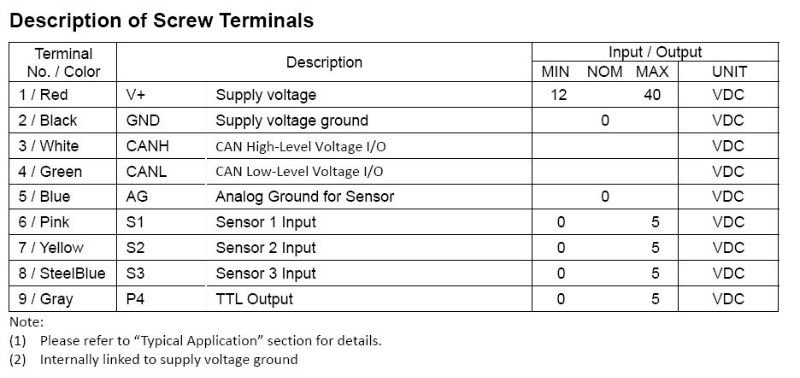
を介してcan-rs232変換器( i。 e。 uim2501)、 ユーザ装置uim242命令することができる複数のコントローラを使用して、 rs232経由asciiコード化された命令。 しじらを変換しますuim2501rs232~can2.0b指示送信しますと、 目標に応じてコントローラコントローラにidであることがユーザーによって指定されたデバイス。
基本的なモーションコントロール1.1. 2
ユーザ装置制御することができ次の基本的な動き/命令を介してパラメータで現実の- 時間:
方向、 速度、 角変位、 相電流、 マイクロ- ステッピング、 を有効にしてください/を無効にする
H- ブリッジ、 等。 速度0〜65入力範囲は、 パルス000/sec、 および角度変位
入力範囲は0〜2,000、 000、 000パルス。
絶対位置1.1. 3カウンター
1.1. 4リアル- 時間変更通知( rtcn)
に似たcpu・rsquo; sインタラプタ、 uim242xx後自動的に生成し特定することができイベント事前定義されたメッセージ、 て、 送信しにそれらユーザデバイス。 時間は1ミリ秒未満から、 イベントの発生に送信されるメッセージ。 メッセージの転送にかかる時間に依存しボーレートのrs232セットアップのuim2501.転送時間未満となり0.5ボー場合はミリ秒単位率は115200からセット。
Uim242xx・rsquo; sシステムrtcn12のイベントをサポートしてい: 変位制御行われ、 赦免ゼロ
位置、 センサ1月2日/3立ち上がりエッジ、 立ち下がりエッジ、 しきい値を超える入力アナログアッパー、 アナログ入力下限しきい値よりも低い、 ステータスなどとttl。 すべてrtcns有効または無効にすることができ、 命令によって。
センサ入力制御モジュール
Uim242xx・rsquo; 支持体のセンサーの入力制御モジュールの3チャンネルはttl入力または1チャンネルデジタルと1チャンネルのアナログ入力。 ユーザー命令することができ、 入力タイプを設定。 ボード上のアナログデジタルへ( adc) 変換器の精度は12ビット、 50khzのサンプリングレート。 アナログ入力はさらなるで平均化され16サンプル出力前のトップユーザー。 更新速度は1khz。 デジタル入力のための、 ユーザーを構成することができ、 所望のアクションとremfときに各センサ・rsquo; の状態( センサーイベント) が変化。 5がありアクションをバインドすることができイベントから8センサー:
1.実行を開始ユーザーによるプリセット速度と加速度/減速率。 方向によって決定され電圧レベルセンサー。
2.急停止。
3.減速を停止する。
4.絶対位置リセットカウンター。
5.処理変位制御運動パラメータを使用してユーザーによるプリセット。( 電子。 g。 spd、 stp、/加速減速、 速度最大スタート、 最大速度を減少させる、 等。)