| 原産地: | 中国(本土) | 銘柄: | wd | モデル番号: | WD-GR5001 | 条件: | 新しい | 提供される売り上げ後のサービス: | 利用できるエンジニア機械類を海外に整備するため |
包装
| 包装: | 保護フィルム |
- 1。 行全体のデモンストレーション

- 2。 全体のラインのbreifの紹介
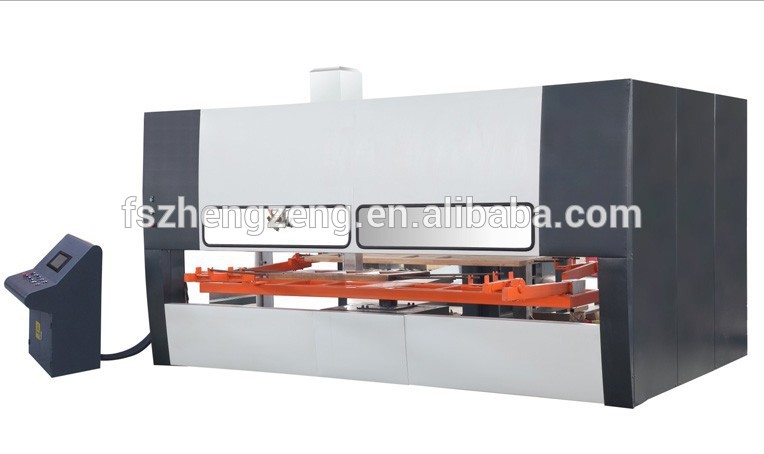
マシンが採用をロータリーダブルトラックロボットプログラミング作業位置と絵画を達成するために高品質かつ効率的な生産。
動作原理は絵画を修正するプログラムのロボット工作物駅と溶射ガンを生成するために自動噴霧ルーチン。 スプレーしてから、 同じ部分は、 データベースに応じて噴霧ルーチン
生産ラインが含まれています- 高度な技術産業用ロボットボディとデュプレックス駅ロータリー作業、 を実現することができ、 高品質& t高速塗装の効果。
- 3。 作業工程:
(1)ローディングのワークは作業ステーション: 1を入れて上に被加工物作業ステーション
(2)最初の絵: ペイントするスタート1とすべてのエッジ。。
(3)第二絵画: の完全な回転ワーク表面の反対側に、 再度スプレー。
(4)交換新しいもの: ロータリー作業ステーションを次のジョブ
- 4。 技術的なパラメータ
1。 適当な長さ:100-1800mm
2。 適切な幅:700-1000mm
3。 適当な厚さ:35~80mm
4。 適当な重量:少ないthan100kg
5。 適切な高さ:800& plusmn; ミリメートル50
6。 速度を塗る: 1~3.5M/min
7。 動作電圧:380v/50hz/3phases
8。 電圧制御システム:Dc/24v
5.主なデバイスの技術仕様
名 | 量 | 設定 |
Er10l-10ロボット | 1セット | ゼロツールセットを装備、 銃器具 最大荷重10kg 翼幅2100ミリメートル 日本精密減速機6セット 日本の三洋サーボモータ6セット -180j1軸・度; に+180・度; J2軸+60・度;- 145に専修度; -60j3軸・度; に+210・度; -180j4軸・度; に+180・度; -135j5軸・度; に+135・度; -360j6軸・度; に+360・度; |
6- 軸多関節ロボット制御キャビネット | 1セット | オーストリアkebaペンダントを教える1pc オーストリアの工業用keba- plc1セット 山陽サーボドライブ6( イーサネット通信とモジュールと制動抵抗器) 日本和泉リレー meanwellスイッチング電源台湾 シュナイダーブレーカ シュナイダー接触 三つの- 相絶縁トランス ドイツフェニックス端子台
|
日本明治溶射ガン | 一台のpc | 調節可能なスプレー、 散布量 輸入された電磁弁 |
自動給油システム | 1セット | ダイヤフラムポンプステーションにペイントすることができ、 一定の圧力のコーティングの均一性を維持 |
システム統合電気boxe | 1セット | 台湾人weinviewタッチスクリーン、 fatakplc |






.jpg)