| 原産地: | 中国(本土) | 銘柄: | borunte | 適用: | スプルーピッカー | 条件: | 新しい | モデル番号: | Brtn3000ws-s3 | 重量: | 2800kg | 保証: | 1年間 | 認証: | ce | 次元(L*W*H): | 5000*3400*3300mm | 提供される売り上げ後のサービス: | 利用できるエンジニア機械類を海外に整備するため | 動力源: | 10.5kva | 推奨私。 m。 m: | 3000- 4000トン | トラバースストローク: | ミリメートル4000 | 横ストローク: | 550-2200mm | 上下ストローク: | 3000ミリメートル | トラバース駆動される: | acサーボモータ | 最大。 ローディング: | キロ80 | ドライ取る- タイムアウト: | Sec4.5。 | ドライサイクルタイム: | 25秒。 | 正味重量: | キロ2800 |
包装
| 包装: | プラスチックパッケージと木製のパッケージ |
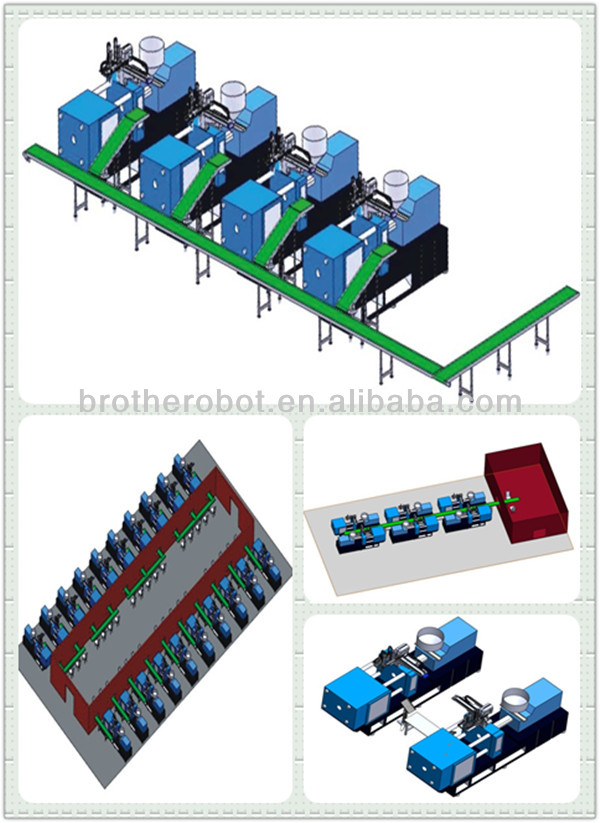
cnc acサーボ大型ビームロボット
brtnシリーズは該当するすべての種類の水平射出機範囲の600-4000 t用取る-アウト製品とスプルー、三軸によって駆動acサーボモータ、取り出しで超高速(1.5sec.)。簡単のためE-O-A-T調整、長い使用して生活と低故障率、該当する取る-アウト製品で短い成形サイクルまたは複雑な自動、などの自動車製品、洗濯機や家電製品を取る-アウト。
8.4インチカラータッチスクリーン。
マイクロコンピュータ制御システム、強い能力の抗干渉、安定した生産と高速計数。
各車軸では機能の加速と減速。
成形暗記機能、これはセット高速ながら交換を型、便利なため生産と効率を高める。
意味:
w:伸縮タイプ。
s:シングルアーム(製品アーム)。
s3:三軸によって駆動acサーボモータ。









* * *知識用ロボット選択* * * | |||
ステップ1:選択にトン数の射出成形機 | |||
下記100トン: | BRP650V | BRB600IDY | |
100〜200トン: | BRB700IDY | BRA700WDY | |
BRB800IS-S2 | BRR600ID-S3/s5 | ||
200〜280Ton | BRA900WDY | BRR800ID-S3/s5 | |
200〜450Ton | BRB1000WDY | BRB1000WD-S2 | |
BRR1000WD-S3/s5 | |||
450〜650Ton | BRB1200WDY | BRB1200WD-S2 | |
BRR1200WD-S3/s5 | |||
650〜千トン | BRC1400WDAGY | BRC1400WDAG-S2 | |
BRC1400WD-S3/s5 | BRTN1400WS-S3 | ||
1000〜1600Ton | BRC1800WDAG-S2 | BRC1800WD-S3/s5 | |
BRTNWD1800WD-S3 | |||
1600〜2200Ton | BRC1800WSA-S2 | BRC2200WD-S3/s5 | |
BRTN2200WS-S3 | |||
2200〜3000Ton | BRTN2600WS-S3 | ||
3000〜4000Ton | BRTN3000WS-S3 | ||
ステップ2:選択のスイングアームロボットまたはトラバースロボットアーム | |||
(1). below 150Tonのimm、2プレート成形またはランナー取出のみ、選択スイングアームロボット。 | |||
(2)。上記150Ton、選択トラバースダブルアームロボット。 | |||
ステップ3:ダブルアームまたは単一のアーム選択 | |||
(1)。ほとんどの製品はから三プレート型、ダブルアームロボットは最高選択のためをoem企業です。 | |||
(2)。ホットランナー型製品、安定した製造指図、単一のアームロボットですを良い選択。 | |||
ステップ4:選択の伸縮アームまたはシングルステージアーム | |||
(1). below 200Ton、私たちは示唆しているシングルステージアーム、その短い垂直ストローク(700ミリメートル) | |||
(2). above 200Ton、選択伸縮アーム。 | |||
(3)。ショップトラベラーと工場では低身長選択する必要があり伸縮アーム。 | |||
ステップ5:選択の二軸、三軸と5軸acサーボ駆動型ロボットアーム。 | |||
a。二軸acサーボ:トラバース-軸と垂直軸によって駆動されるacサーボモータ。 | |||
利点ワン: | |||
トラバース-軸によって駆動acサーボモータ、正確な位置、短いサークル時間、リモート調整、便利で速い。製品に置くことが複数のポイントを装備ベルトコンベア。 | |||
利点二つ: | |||
(1)。垂直-アームによって駆動acサーボモータ、正確な垂直旅行、安定した製品吸い、と少ないアラーム。 | |||
(2)。リモート調整の垂直軸、保存を時間用eoat調整。 | |||
(3)。垂直軸によって駆動acサーボモータ、製品を取る-アウト時間はよりも高速シリンダー駆動される。保存をサークル時間と生産性を増加させることよりも10%。 | |||
(4)。それは安くも三軸と5軸ロボットアーム。 | |||
b。三軸と5軸すべてacサーボロボットアーム | |||
(1)。すべての軸acサーボ駆動型ロボットアーム、速いスピードと短時間用eoat調整。 | |||
(2). with機能の型ラベリングと型挿入。 | |||
(3). the価格が高くなる。 | |||