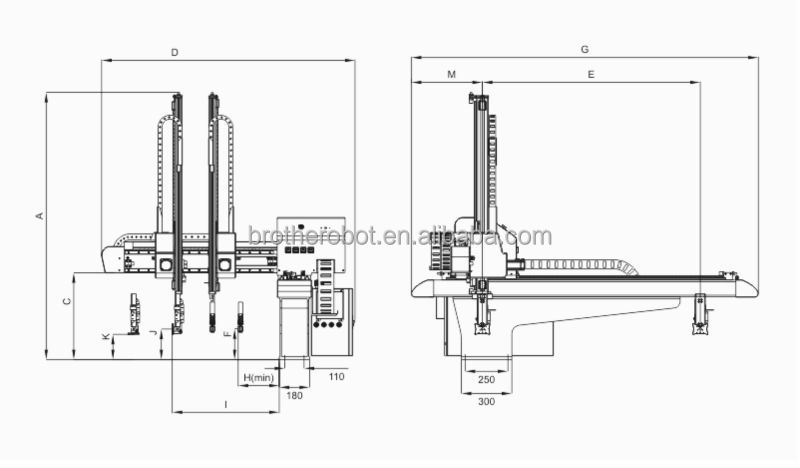
| 原産地: | 中国(本土) | 適用: | プラスチック製品を取り出す | 銘柄: | borunte | モデル番号: | を取り出してbrr800is-s3射出成形機用ロボットアームを | 重量: | 200kg | 力(W): | 3.2/1.7kva | 縦旅行(mm): | 800ミリメートル | 高度の速度: | 0.8秒。 | 認証: | Ce、 sgs、 tuv、 iso9001: 2008年 | 提供される売り上げ後のサービス: | 利用できるエンジニア機械類を海外に整備するため | Horizonal旅行(mm): | 1500ミリメートル | 条件: | 新しい | 保証: | 1年間 | 次元(L*W*H): | 2360*1300*1830mm | コントローラシステム: | Lnc/hc | acサーボモータ: | パナソニック/inovance | リニアスライドレール: | thk日本 | ドラフトスイッチ: | サンクス日本 | ケーブル: | helukabelドイツ | 電力供給者: | MEANWELL台湾 | 真空発生器: | 日本myotoku | 電磁弁: | Syn/tpc韓国 | トラバースベルト: | nok日本 | 速度ジョイント: | legrisフレンチ |
包装
| 包装: | を取り出して射出成形機用ロボットアームをパッケージ化された木製のケースでとプラスチックストレッチフィルム |
を取り出して射出成形機用ロボットアームを












ミセス。 ニコール
スカイプ: ニコール。 zhu1991
Whatsapp: 008618825540510
Tel: +0086-0-76939011165
ファックス: +0086-0769-81066785
貿易マネージャーid: cn1501612494
| ロボット選択のための知識 | ||
| ステップ1: 選択のトン数に射出成形機 | ||
| 100~200トン: | brp650v | brb600idy |
| 100~200トン: | brb700idy | bra700wdy |
| Brb800is-s2 | Brr600id-s3/s5 | |
| 200~280ton | bra900wdy | Brr800id-s3/s5 |
| 200~450ton | brb1000wdy | Brb1000wd-s2 |
| Brr1000wd-s3/s5 | ||
| 450~650ton | brb1200wdy | Brb1200wd-s2 |
| Brr1200wd-s3/s5 | ||
| 650~1000ton | brc1400wdagy | Brc1400wdag-s2 |
| Brc1400wd-s3/s5 | Brtn1400ws-s3 | |
| 1000~1600ton | Brc1800wdag-s2 | Brc1800wd-s3/s5 |
| Brtnwd1800wd-s3 | ||
| 1600~2200ton | Brc1800wsa-s2 | Brc2200wd-s3/s5 |
| Brtn2200ws-s3 | ||
| 2200~3000ton | Brtn2600ws-s3 | |
| 3000~4000ton | Brtn3000ws-s3 | |
| ステップ2: の選択- スイングアームロボットまたは横断するロボットアーム | ||
| (1)。 下150immのトン、 二枚の板やランナーのための成形を取る- アウトのみ、 セレクト- スイングアームロボット。 | ||
| (2)。 上記150トン、 セレクト横断するダブル- アームロボット。 | ||
| ステップ3: ダブル- アームまたはシングル- アーム選択 | ||
| (1)。 ほとんどの製品は、 旧3- 板の金型、 ダブル- アームロボット最善の選択でoemのための企業。 | ||
| (2)。 熱い- ランナー金型製品、 安定した生産順序付き、 シングル- アームロボットは良い選択。 | ||
| ステップ4: 伸縮アームの選択または単段アーム | ||
| (1)。 下200トン、 単段アームはどうでしょ、 のための垂直その短いストローク( 700ミリメートル) | ||
| (2)。 上記の200トン、 セレクト伸縮アーム。 | ||
| (3)。 ショップ様や工場とともに、 低高さ伸縮アームが選択する必要があり。 | ||
| ステップ5: の選択2- 軸、 3- 軸と5- 軸acサーボ駆動ロボットアーム。 | ||
| 、。 2は- 軸acサーボ: トラバース- 軸と垂直- 軸acサーボモータにより駆動される。 | ||
| 一つ利点: | ||
| トラバース- 軸acサーボモータにより駆動される、 正確な位置、 短いサークルタイム、 リモート調整、 便利で速い。 製品に配置することができ複数- ポイントを装備ベルトコンベア。 | ||
| 利点2つ: | ||
| (1)。 垂直- アームacサーボモータにより駆動される、 精密垂直走行、 安定した製品を吸う、 アラームと少ない。 | ||
| (2)。 リモート調整の垂直- 軸、 ための時間を節約するeoat調整。 | ||
| (3)。 垂直- 軸acサーボモータにより駆動される、 製品を取る- アウトよりも早くシリンダ駆動の時間は。 を保存しますサークルの時間と生産性を増加させることができる10%以上。 | ||
| (4)。 よりも安価である3- 軸と5- 軸ロボットアーム。 | ||
| B。 3- 軸と5- 軸すべてのacサーボロボットアーム | ||
| (1)。 すべて- 軸acサーボ駆動ロボットアーム、 速いスピードでeoat調整のための時間と短い。 | ||
| (2)。 モールドラベリングの機能を持つやカビを挿入する。 | ||
| (3)。 価格が高くなっ。 | ||