製品情報
| カテゴリ出力モデル: デジタルセンサー | カテゴリ原理: バイオセンサー | 使用カテゴリ: ポジションセンサー |
| 材料: 混合物 |
包装
| 包装: オリジナル鉛- フリー、 rohs対応、 集積回路( ic)、 等。、 工場のためのサービスに特化していbomやトレーダー。 |
仕様
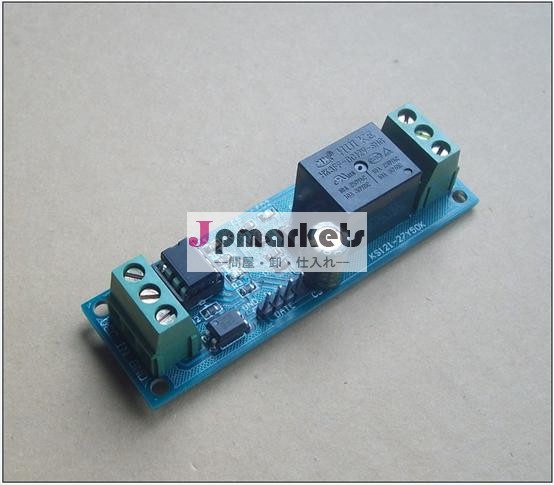
スマートカー工場直接障害物回避センサーモジュール太陽光発電モジュール赤外線反射センサーチューブ
説明モジュール
適応可能、 周囲の光センサモジュール、 のペアを有する赤外線送信機と受信機、 トランスミッターチューブ赤外線を放出し、 特定の周波数検出方向されたとき、 障害物( 反射面)
その反射されたときに赤外線レシーバーチューブが受け取られた後にコンパレータ回路の処理、 緑色のランプが点灯します、 ながらデジタル信号出力信号出力インタフェース( a低- レベル信号) することができ
ポテンショメータノブ検出距離を調整するために、 有効距離範囲2〜30mm、 3.3v-5vの動作電圧は、。 の検出範囲は、 センサーを得ることができるを調整することにより、 少しの干渉を有するポテンショメータ、 簡単なインストール
と機能を使用すると簡単に、 広く使用することができるロボット障害物回避、 障害物回避行数トロリー、 と黒と白のライントラッキングおよび他の多くの機会。
モジュールパラメータ
障害物を検出したときにモジュールの前で信号、 緑色のインジケータライトはボード上のレベル、 低しばらく- レベルの連続出力信号ポートから、 モジュールは距離2〜30mmを検出します、 検出角度35・度;
検出距離を調整することにより、 行うことができる時計回りポテンショメータ調整ポテンショメータを検出するために距離が増加; ポテンショメータを調整するために反時計回り検出距離を減らすために。
2,アクティブ赤外線を検出するセンサーは、 反射された、 そして、 その結果、 の形状はターゲットの反射率検出範囲が重要。 最小検出距離黒が、 ホワイト最大; 小さなオブジェクトから、 小さな面積、 広い面積から
大規模な。
3,出力することができるセンサモジュール電源障害から直結してマイクロコントローラioポート、 あなたは直接5vリレーを運転; 接続: vcc-vcc; gnd-gnd; out-io
4,lm393コンパレータを使用して、 安定した;
5,に使用することができ3-5vdc電源モジュールを供給する。 ときに電源がオンになっている、 赤い電源ランプ光;
6,3mm穴のネジを使って、 簡単に固定設置;
7,ボードサイズ: ※1.9センチメートル3.6センチメートル
8,各モジュールの出荷台数を比較するしきい値電圧を調整されていポテンショメータによっては良い、 ない例外的な状況、 任意にポテンショメータを調整するしないでください。
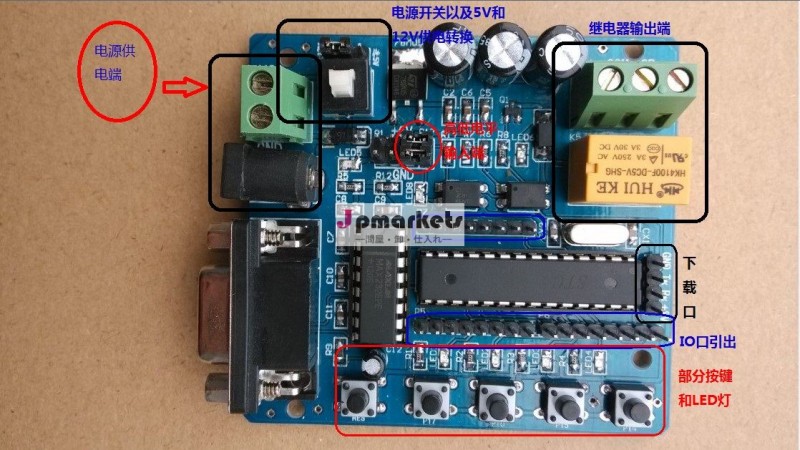
モジュールインターフェイスの説明
Vcc13.3v-5v外部電圧( することができに直接接続された5vと3.3vmcumcu)
外部2gndgnd
うち3小さなボードデジタル出力インターフェース( 0と1)
船積みのリスト
障害になる、 防止センサーモジュール